自動運転レベル4を見据え、日立市で路車協調システムの実証実験を実施
SMICIP(組合員企業各社)は、2025年2月に国土交通省 関東地方整備局が実施する「路車協調システムの技術的検証を目的とした自動運転実証実験」へ路車協調システムを提供します。本実証実験は日立市、株式会社みちのりホールディングス、茨城交通株式会社が実施する自動運転バス走行の実証実験と連携し、自動運転を支援する路車協調システムの検証を行うものです。
日立市で行われる自動運転バス走行実証実験
日立市で行われる自動運転バス走行実証実験の詳細はこちら

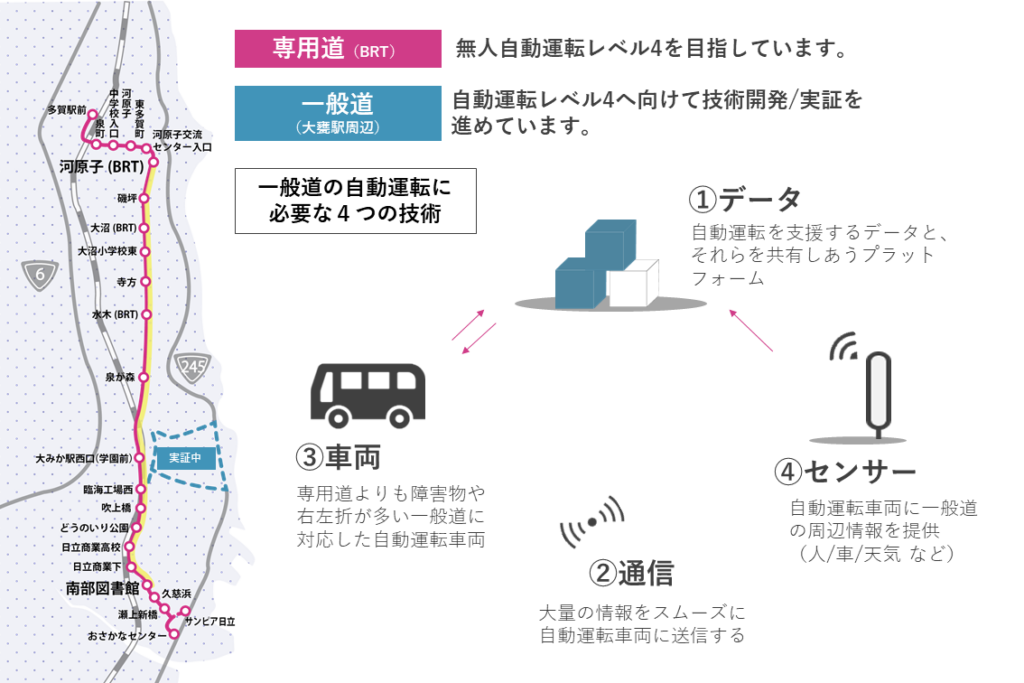
日立市、株式会社みちのりホールディングス、茨城交通株式会社は多賀駅〜おさかなセンター間のBRT専用道での自動運転レベル4における営業運行および、大甕駅・おさかなセンター前の一般道において自動運転の実証実験を行なっており、SMICIP(組合員企業各社)は一般道の実証実験において、路車協調システムを提供しております。
※ひたち無人自動運転バスプロジェクトホームページより引用
自動運転バスルート上の3箇所で路車協調システムの実証実験を実施
将来的な自動運転レベル4を見据え、大甕駅前および、おさかなセンター前の自動運転バスルート上の3箇所で路側インフラによる物標情報の取得及び自動運転車両へ搭載した車載機への伝達により、危険有無の画面表示によるドライバー支援(将来的な路側インフラによる車両制御を見据えた技術的検証を含む)および、路側インフラで取得した物標情報を車載センサーが取得した物標情報に加え自動運転車両の制御を支援する実証実験を行います。

※HMI(Human Machine Interface):本実証では危険有無の画面表示による検証
a.吹上通り左折/右折支援
将来的な路車協調による車両の制御を見据え、自動運転バスがBRT専用道から優先道路へ左折して進入および、優先方路から右折しBRT専用道へ戻る際に、優先方路の車両および歩道の自転車・歩行者を検知し、車載機と通信することで危険有無の画面表示によるドライバー支援を行います(将来的な路側インフラによる車両制御を見据えた技術的検証を含む)。優先方路車両の実勢速度を考慮すると、150m程度遠方の物標検知が必要なケースとなります。
▼検出範囲
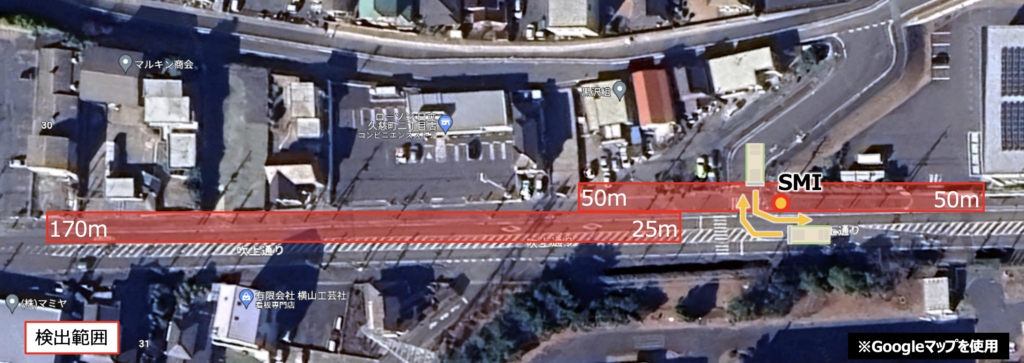
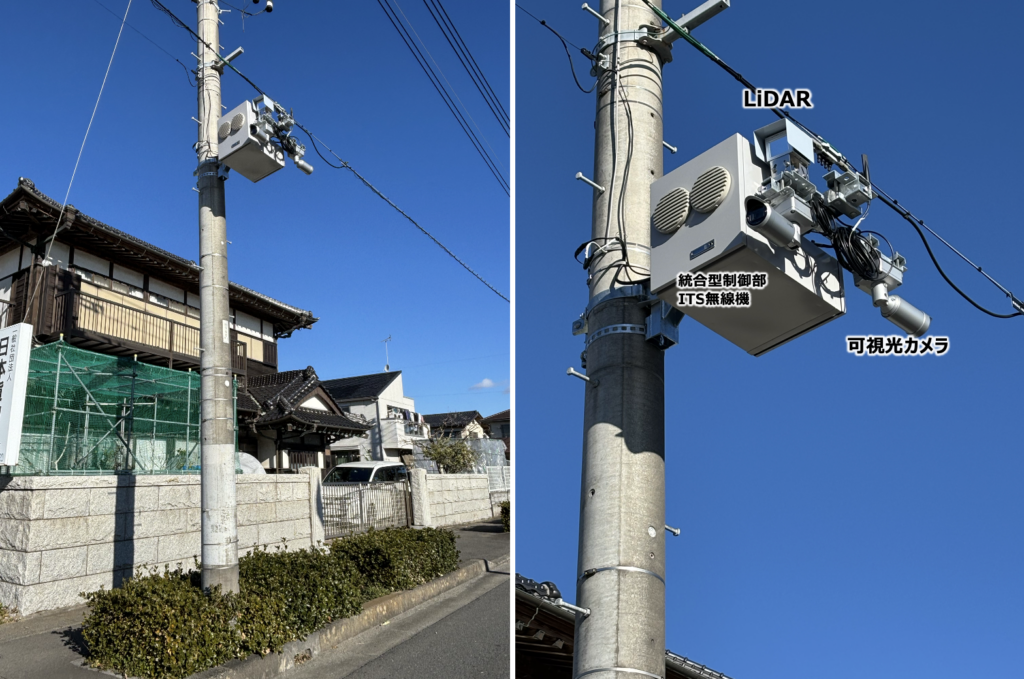
SMI:スマートモビリティインフラ(SMICIPが提供する路側機器および路車協調システムの総称)
▼機器設置後写真

c.臨海工場バス停出発支援
将来的な路車協調による車両の制御を見据え、自動運転バスがバス停から出発する際に、後方から接近する車両を検知し危険有無の画面表示によるドライバー支援を行います(将来的な路側インフラによる車両制御を見据えた技術的検証を含む)。後方の道路に勾配があるため車両センサーの検出範囲が限定的となり、路側インフラによる支援が必要となるケースとなります。
▼検出範囲

SMI:スマートモビリティインフラ(SMICIPが提供する路側機器および路車協調システムの総称)
▼機器設置後写真

t.久慈交流センター前右折支援
自動運転バスが非優先方路から優先方路へ右折して進入する際に、車載センサーで取得した物標情報へインフラで取得した物標情報を加えることで、より広範囲の物標情報から右折開始または停止維持を判断に活用することが可能です。これにより、車載センサー検知範囲外から進入する車両や障害物による遮蔽により検知が困難な車両との交錯可能性を減少させ、ドライバーによる手動介入や自動運転車両の急制動の発生、優先方路車両の減速による交錯回避の減少を検証する実証実験です。優先方路車両の実勢速度を考慮すると、車両から見た右側方路約80m、左側方路約140m遠方の物標検知が必要なケースとなります。
▼右折時の様子

▼検出範囲

SMI:スマートモビリティインフラ(SMICIPが提供する路側機器および路車協調システムの総称)
▼機器設置後写真
| 実証名 | FY24日立市 自動運転支援 路車協調実証 |
| 実施場所 | 日立市大甕駅周回バスルート内(2箇所) 日立市みなと町おさかなセンター付近(1箇所) |
| 実証期間 | 2025年2月中 |
| 支援対象 | 自動運転車両(ティアフォー製 Minibus) |
| 支援形式 | 物標情報の検出・760MHz通信によるHMI表示および車両制御 |