自動運転レベル4を見据え、富山市で路車協調実証を実施
SMICIPでは2024年9月に国土交通省 北陸地方整備局が実施する実証実験へ路車協調システムを提供します。本実証実験は富山市が実施する自動運転バス走行実証実験と連携し、自動運転支援に資する路車協調システムの検証を行うものです。
自動運転バスルート上の2箇所で路車協調システムの実証実験を実施
将来的な自動運転レベル4を見据え、見通しの悪い左折交差点および対向車の速度の速い右折交差点の2箇所で、SMI*で取得した物標情報を自動運転車の車載機へ伝達し、車両へ設置したスマートフォンの画面に危険表示を行う形で実証を行います。
*SMI(スマートモビリティインフラ):スマートモビリティインフラ技術研究組合が提供する路車協調サービスの総称
1.下坂倉交差点
自動運転バスが左折する際に死角となる歩行者や自転車の逆走を検知し車両側へ伝達します。左折先の死角に歩行者や自転車がいる場合に緊急の手動介入となることを避けることを目的としたユースケースとなります。
▼設置した機器

FIRセンサー(遠赤外線センサー)の物標情報に自転車・歩行者が含まれる場合、自動運転車両へ危険通知を行います。
2.羽根交差点
自動運転バスが右折する羽根交差点では、時速50km近くの速度で対向車が通過します。自動運転バスの右折に要する時間を考えると、150m~200mほど遠方から接近する車両の情報を取得することが望ましく、また、対向右折車の車両滞留により自動運転車両のセンサーが遮蔽されることも懸念されます。今回の実証では交差点中央から150m先から接近する物標情報の取得をSMIにより行います。
▼設置した機器
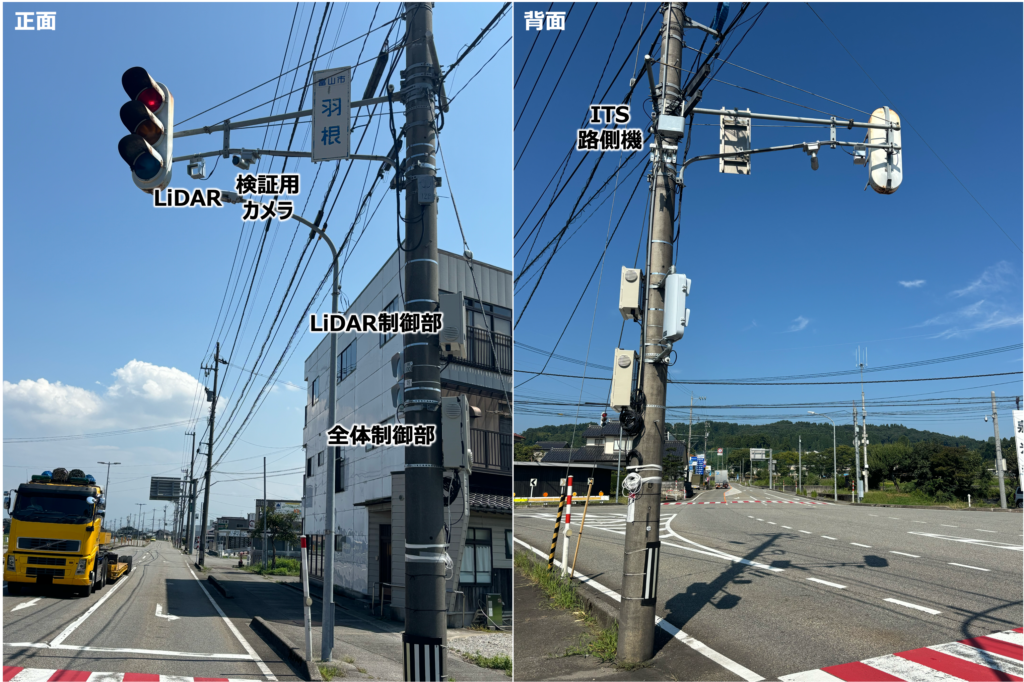
自動運転車両の右折時に対向車が検知された場合、自動運転車両へ危険通知を行います。