自動運転車の走行ルートを、自由に設計できる未来へ。
現在、全国の自治体でコミュニティバス等による自動運転の実証実験が進められておりますが、道路環境が複雑な日本では多くの地域で、限られたルートでしか安全性が担保されず走行できない、オペレーターの同乗を前提にした走行しかできない、など様々な技術的課題が浮上しています。
当社ではSMI(スマートモビリティインフラ)により路車協調システム*を構築し、見通しの悪い交差点等において、自動運転車両を支援し安全で快適な走行を実現します。SMICIPは、組成前に組合員が受託したものも含め、2021年以降に自動運転における路車協調の実証実験を20以上の地域で実施しております。
*路車協調システム:電柱等の路側構造物に設置され、自動運転車の走行ルート上の交通参加者や障害物の情報を検知し車両に伝達するシステム
当社のSMIを用いた路車協調による自動運転支援で実現できる内容は以下のとおりです。
・自動運転率の向上
・MRM(Minimum Risk Maneuver)/手動介入の削減
・交差点通過に要す時間の短縮
・不要な停止や減速、徐行の削減
・見通しの悪い道路での安全な走行
・急加減速の削減 …etc.
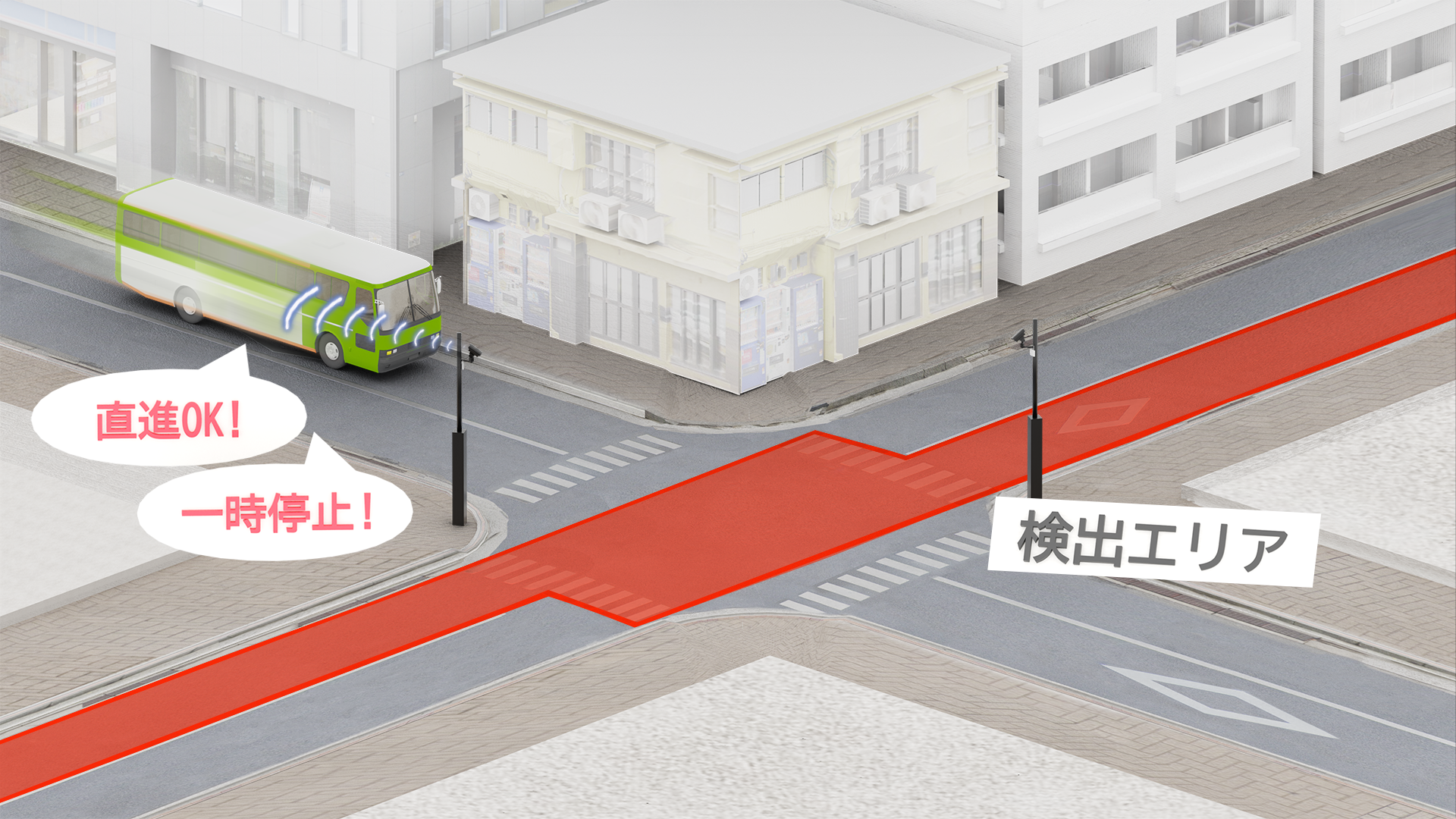
直進支援
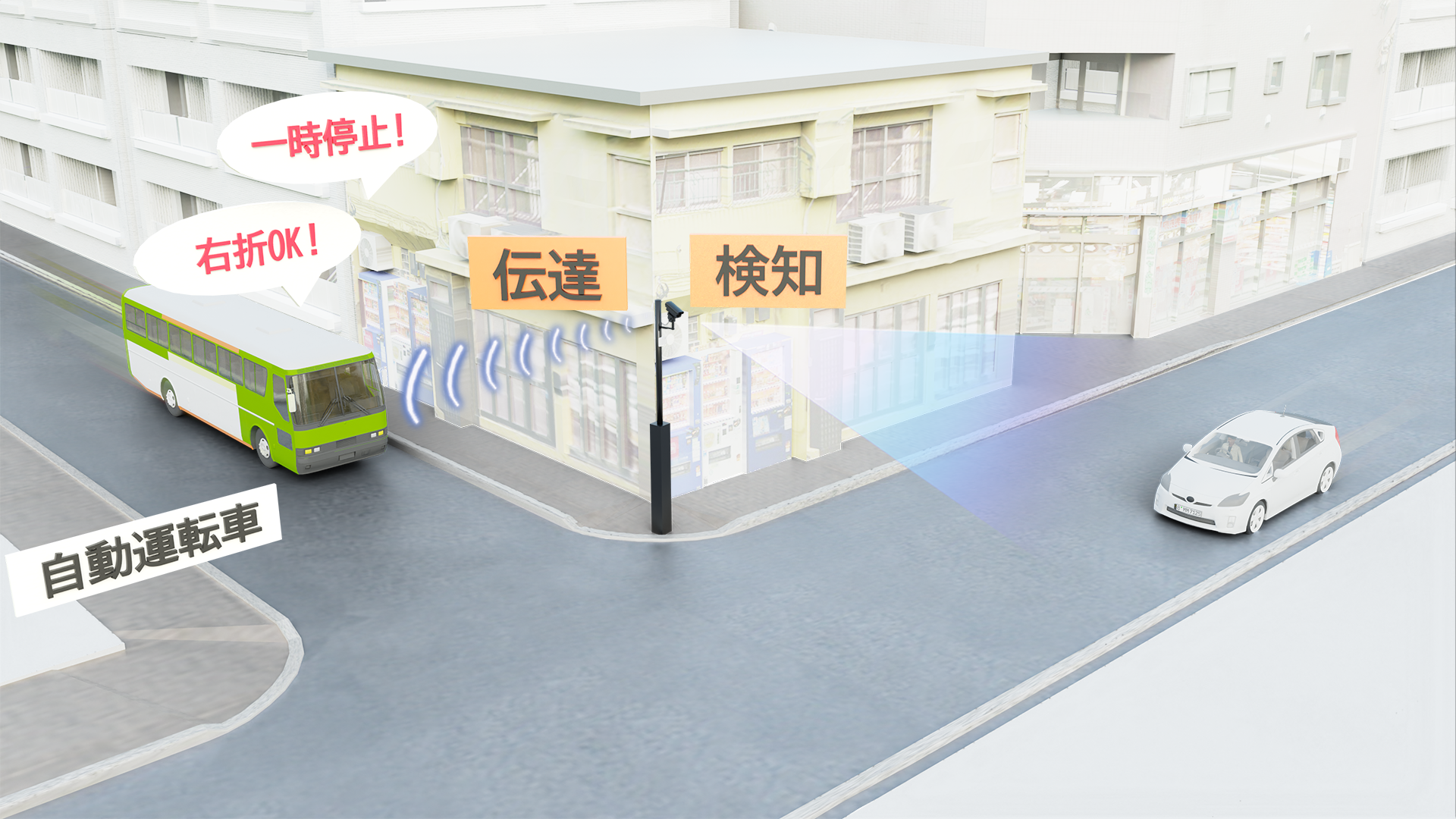
主に信号のない交差点において、非優先方路を進行する自動運転車両が優先道路を横断する際に、従来は車両だけのセンサーでは停止・徐行等で横断に時間がかかっていましたが、SMIで100m~200m先から交差点に侵入する車両を検知することで交差点通過をスムーズに行うことが可能です。また、自動運転車両が優先方路を進行していた場合にも、歩行者や自転車の飛び出しを検知することで安全性を高めることが可能となります。
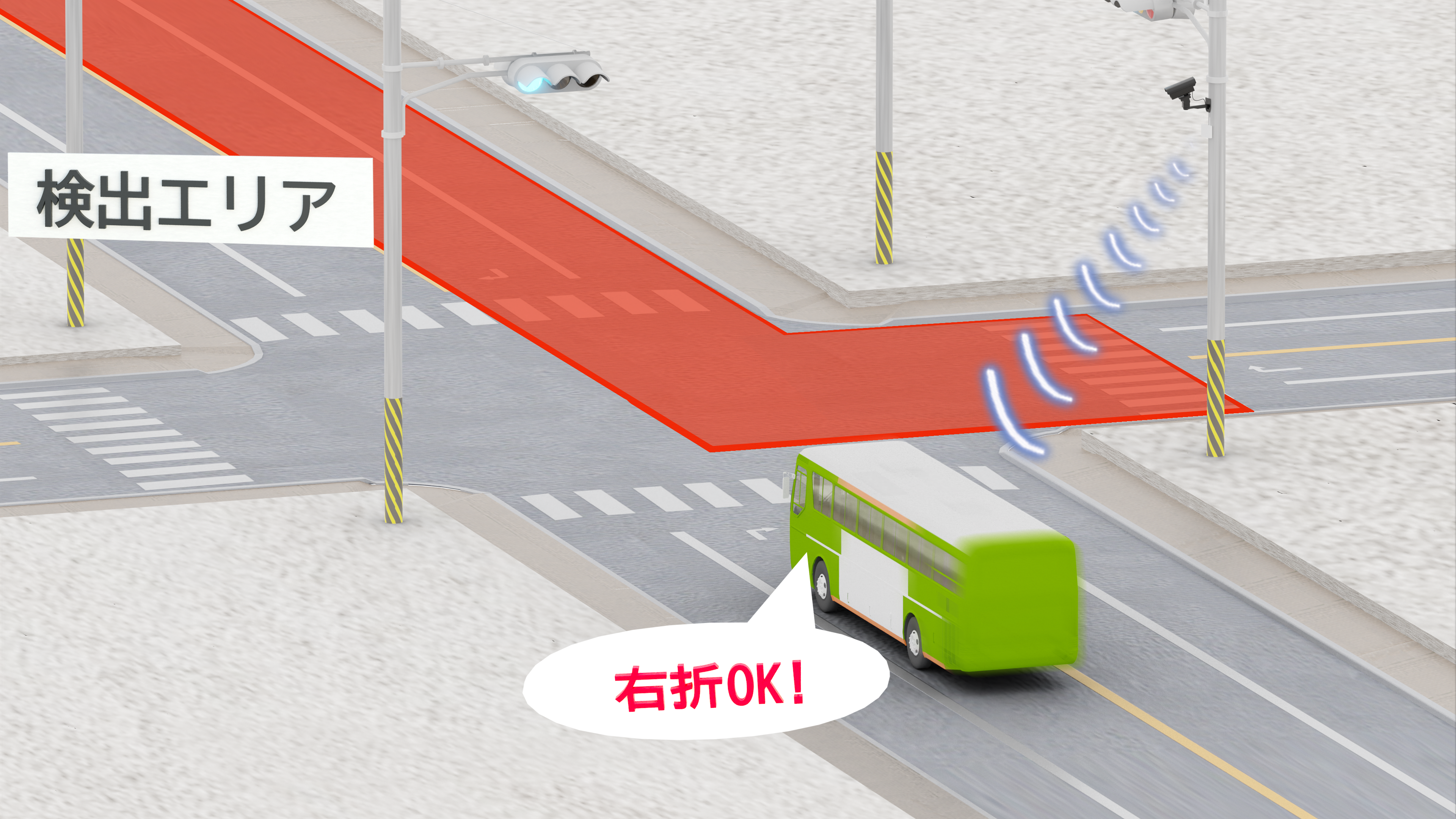
右折支援
信号あり交差点において自動運転車が右折を行う場合、対向車の速度速く十分に安全が確保されない場合や、右折待ちの対向車で対向車が隠れてしまう場合に、100~200m程度から対向車を検知することで安全性を確保することが可能です。また、信号なし交差点における右折でも右折先の車線を検知することでスムーズな交差点通過が可能になります。
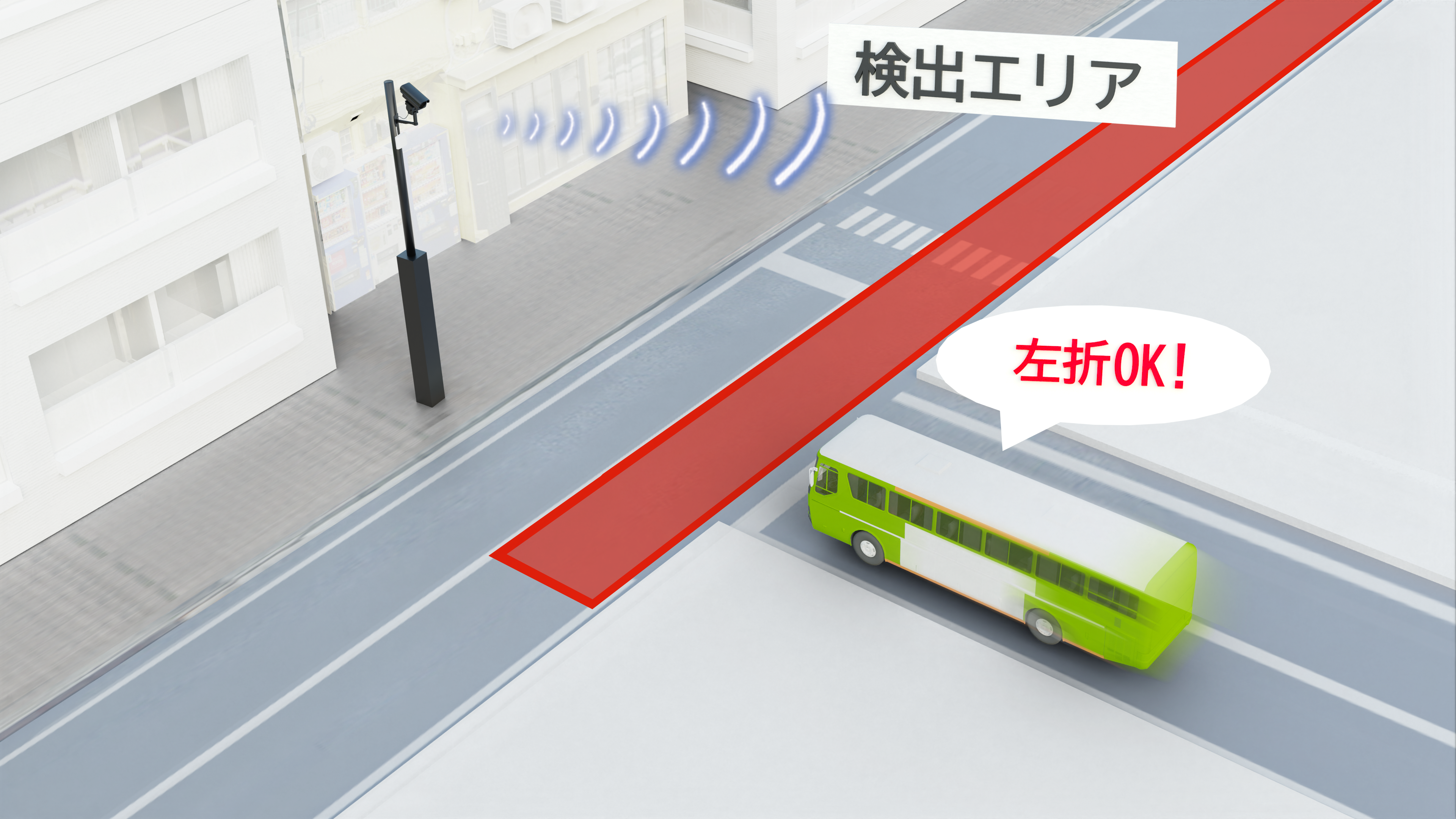
左折支援
主に信号なし交差点において自動運転車両が左折を行いたい場合、右側から来る車両の検知が必要ですが、見通しの悪い交差点や車両の速度が速い場合、車両のセンサーだけでは左折の判断・実行に時間がかかることが懸念されます。SMIにより右側から来る車両を200m近く先から検出を行うことで、スムーズな左折をサポートすることが可能です。
出発支援
自動運転車両がバス停から出発し道路へ合流する際に、後方から近づく車両を検知することでスムーズな走行を支援します。

信号連携
信号の灯色情報・サイクル情報を自動運転車両へ伝えることで、西陽において車載センサーで信号灯色を検知できない場合の支援や、青信号から黄色信号へ変わる際の車両の減速をスムーズに実施するための支援が可能です。
当社では路車協調システムにおけるご提案、機器提供、各種手配・機器設置、データ分析までトータルでご支援することが可能です。
SMIにより交差点における安全性・快適性の向上、自動運転レベル4の実現、利用者ニーズに基づいた走行ルートの実現など、様々な形で安全で快適な自動運転社会の実現を支援しています。